
Keel
Tooteotsing
Keel
- English
- 简体中文
- Тоҷикӣ
- O'zbek
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel

Firmauudised
Püsimagnetitega sünkroonveomasinate tähesulgumise arvutamise ja rakendamise uurimine
2025-08-07
Taust
Püsimagnetilisi sünkroonmootoreid (PMSM) kasutatakse laialdaselt kaasaegses tööstuses ja igapäevaelus tänu nende kõrge efektiivsuse, energiasäästu ja töökindluse eelistele, mistõttu on need eelistatud jõuseadmed paljudes valdkondades. Püsimagnetiga sünkroonsed veomasinad tänu täiustatud juhtimistehnoloogiatele ei taga mitte ainult sujuvat tõsteliikumist, vaid ka liftikabiini täpset positsioneerimist ja ohutust. Oma suurepärase jõudlusega on neist saanud paljude liftisüsteemide põhikomponendid. Liftitehnoloogia pideva arenguga suurenevad aga püsimagnetitega sünkroonveomasinate jõudlusnõuded, eriti aga "tähtsulgemise" tehnoloogia rakendamine, millest on saanud uurimistöö leviala.
Uurimisprobleemid ja tähtsus
Püsimagnetiga sünkroonsete veojõumasinate tähetihendusmomendi traditsiooniline hindamine tugineb teoreetilistele arvutustele ja mõõdetud andmetest tuletamisele, millel on raskusi tähtede sulgemise ülimööduvate protsesside ja elektromagnetväljade mittelineaarsuse arvestamisega, mille tulemuseks on madal efektiivsus ja täpsus. Hetkeline suur vool tähtede tihendamise ajal kujutab endast ohtu püsimagnetite pöördumatuks demagnetiseerumiseks, mida on samuti raske hinnata. Lõplike elementide analüüsi (FEA) tarkvara arendamisega on need probleemid lahendatud. Praegu kasutatakse projekteerimise suunamiseks rohkem teoreetilisi arvutusi, mille kombineerimine tarkvaraanalüüsiga võimaldab kiiremat ja täpsemat tähetihendusmomenti analüüsida. Selles artiklis on kasutatud püsimagnetiga sünkroontõmbemasinat, et viia läbi selle tähttihendi töötingimuste lõplike elementide analüüs. Need uuringud ei aita mitte ainult rikastada püsimagnetitega sünkroonsete veojõumasinate teoreetilist süsteemi, vaid pakuvad ka tugevat tuge liftide ohutuse parandamiseks ja jõudluse optimeerimiseks.
Lõplike elementide analüüsi rakendamine tähtede tihendamise arvutustes
Simulatsioonitulemuste täpsuse kontrollimiseks valiti olemasolevate katseandmetega veomasin, mille nimikiirus on 159 p/min. Mõõdetud püsiseisundi tähetihendusmoment ja mähisvool erinevatel kiirustel on järgmised. Tähtede sulgemise pöördemoment saavutab maksimumi kiirusel 12 p/min.
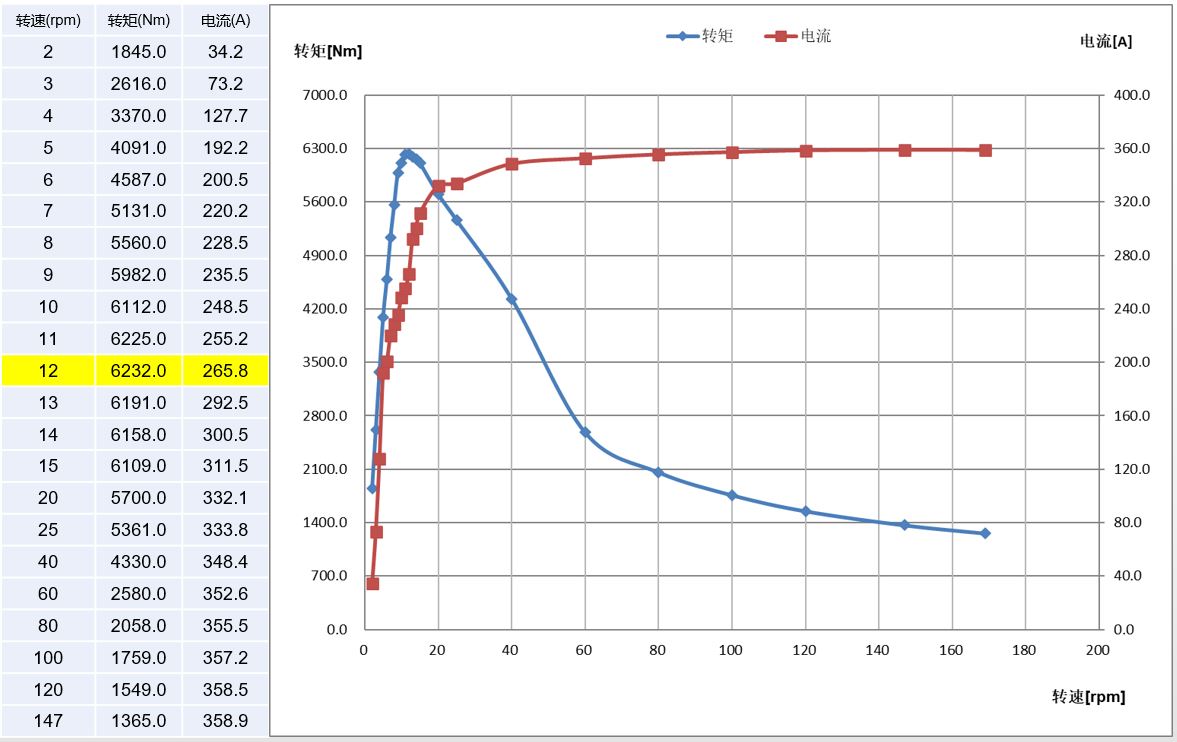
Joonis 1: Tähtede tihendamise mõõdetud andmed
Järgmisena viidi Maxwelli tarkvara abil läbi selle veomasina lõplike elementide analüüs. Esmalt pandi paika veomasina geomeetriline mudel ning pandi paika vastavad materjaliomadused ja piirtingimused. Seejärel saadi elektromagnetvälja võrrandeid lahendades püsimagnetite aja-domeeni voolukõverad, pöördemomendi kõverad ja demagnetiseerumisolekud erinevatel aegadel. Kontrolliti simulatsioonitulemuste ja mõõdetud andmete järjepidevust.
Tõmbemasina lõplike elementide mudeli loomine on elektromagnetilise analüüsi jaoks ülioluline ja seda siin ei käsitleta. Rõhutatakse, et mootori materjalisätted peavad vastama tegelikule kasutamisele; Arvestades püsimagnetite hilisemat demagnetiseerimise analüüsi, tuleb püsimagnetite puhul kasutada mittelineaarseid B-H kõveraid. See artikkel keskendub sellele, kuidas rakendada Maxwellis veojõumasina tähesulgumise ja demagnetiseerimise simulatsiooni. Tarkvara tärnide tihendamine toimub välise vooluahela kaudu, mille konkreetne vooluahela konfiguratsioon on näidatud alloleval joonisel. Veojõumasina kolmefaasilised staatori mähised on ahelas tähistatud kui LPhaseA/B/C. Kolmefaasiliste mähiste äkilise lühise tähtsulgumise simuleerimiseks ühendatakse paralleelmoodul (koosneb vooluallikast ja vooluga juhitavast lülitist) järjestikku iga faasimähise ahelaga. Algselt on vooluga juhitav lüliti avatud ja kolmefaasiline vooluallikas varustab mähiseid toiteallikaga. Määratud ajal vooluga juhitav lüliti sulgub, lühistades kolmefaasilise vooluallika ja lühistades kolmefaasilised mähised, sisenedes lühise tähtsulguri olekusse.
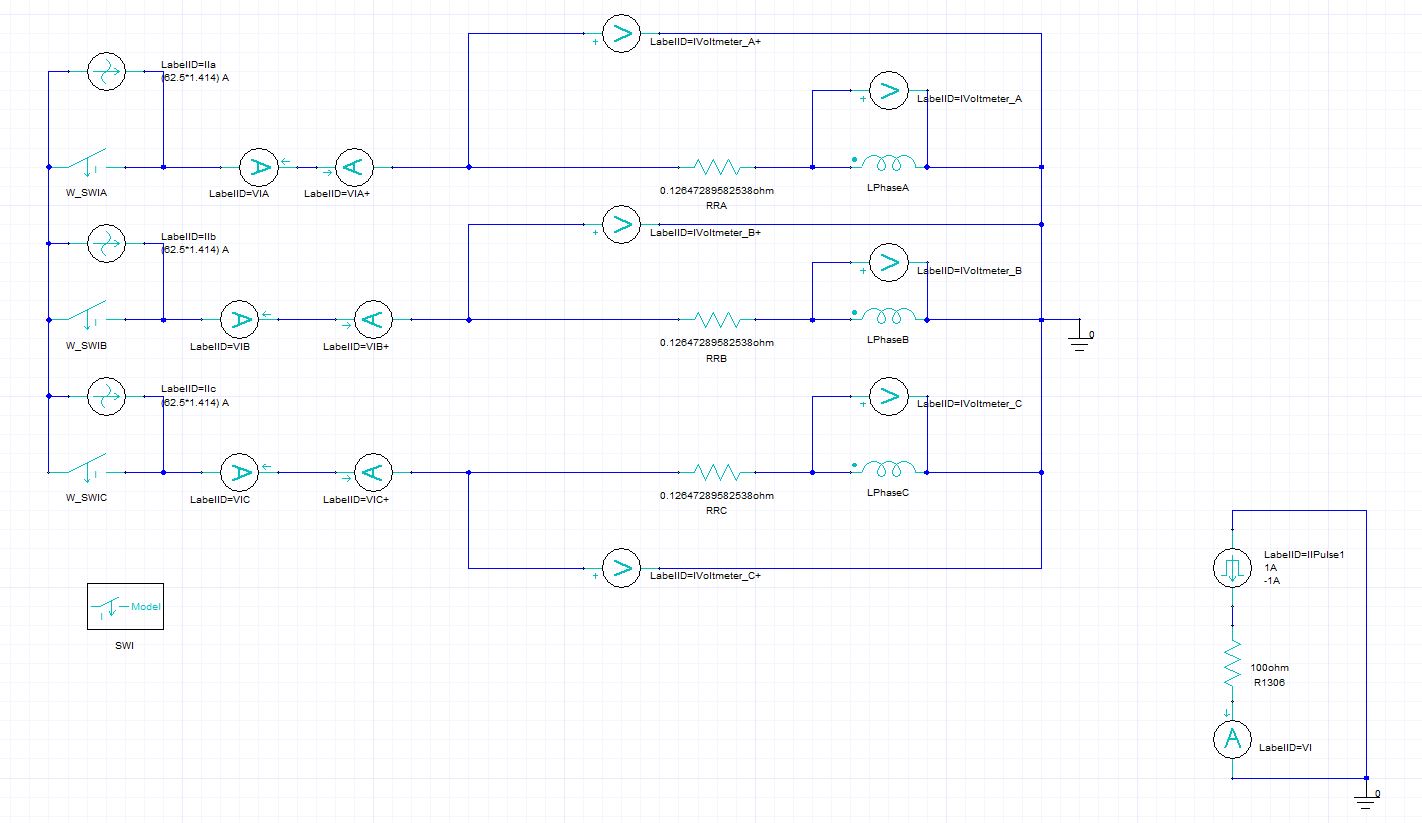
Joonis 2: Star-Sealing Circuit Design
Tõmbemasina mõõdetud maksimaalne tähetihendusmoment vastab kiirusele 12 p/min. Simulatsiooni ajal määrati kiirused parameetriteks 10 p/min, 12 p/min ja 14 p/min, et ühtlustada mõõdetud kiirusega. Seoses simulatsiooni seiskamisajaga, arvestades, et mähisvoolud stabiliseeruvad kiiremini madalamatel kiirustel, määrati ainult 2–3 elektrilist tsüklit. Tulemuste aja-domeeni kõverate põhjal võib järeldada, et arvutuslik tähetihendusmoment ja mähisvool on stabiliseerunud. Simulatsioon näitas, et püsiseisundi tähetihendusmoment kiirusel 12 p/min oli suurim, 5885,3 Nm juures, mis oli mõõdetud väärtusest 5,6% madalam. Mõõdetud mähisvool oli 265,8 A ja simuleeritud vool 251,8 A, kusjuures simulatsiooniväärtus oli samuti 5,6% väiksem kui mõõdetud väärtus, mis vastab projekteerimise täpsuse nõuetele.
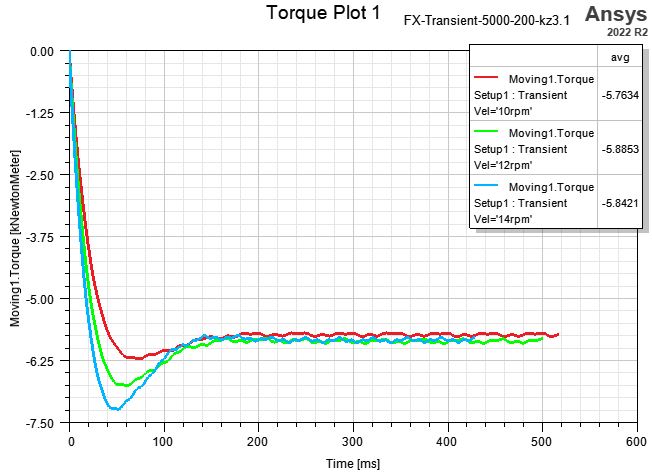
Joonis 3: Täht-tihendusmoment ja mähisvool
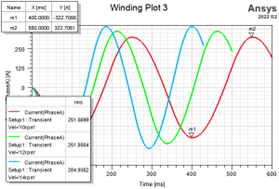
Veomasinad on ohutuse seisukohalt kriitilised eriseadmed ning püsimagneti demagnetiseerimine on üks peamisi tegureid, mis mõjutab nende jõudlust ja töökindlust. Standardeid ületav pöördumatu demagnetiseerimine ei ole lubatud. Selles artiklis kasutatakse Ansys Maxwelli tarkvara, et simuleerida püsimagnetite demagnetiseerimisomadusi pöördmagnetväljade all, mis on põhjustatud lühisvooludest tähe sulgemise olekus. Mähise voolutrendist ületab voolu tipp tärnide sulgemise hetkel 1000 A ja stabiliseerub pärast 6 elektritsüklit. Maxwelli tarkvara demagnetiseerimise määr näitab püsimagnetite jääkmagnetismi suhet pärast demagnetiseeriva väljaga kokkupuudet nende algse jääkmagnetismiga; väärtus 1 näitab demagnetiseerumist puudumist ja 0 täielikku demagnetiseerumist. Demagnetiseerimiskõverate ja kontuurkaartide põhjal on püsimagneti demagnetiseerimise määr 1, kusjuures demagnetiseerimist ei täheldatud, mis kinnitab, et simuleeritud veojõumasin vastab töökindlusnõuetele.
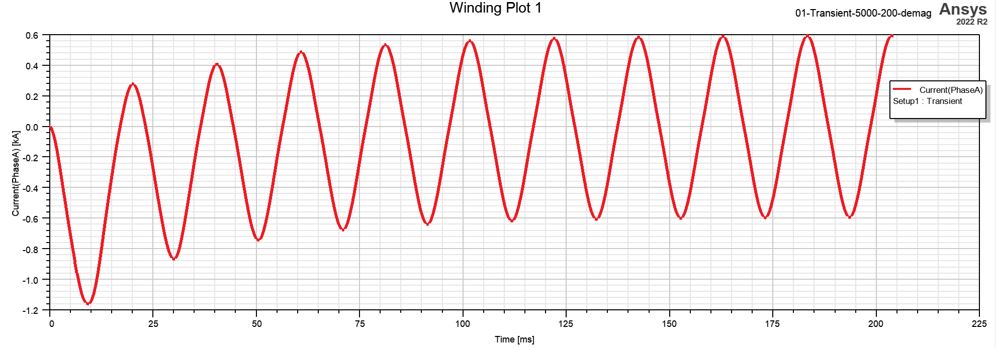
Joonis 4: Mähise voolu aja-domeeni kõver tähttihendusega nimikiirusel
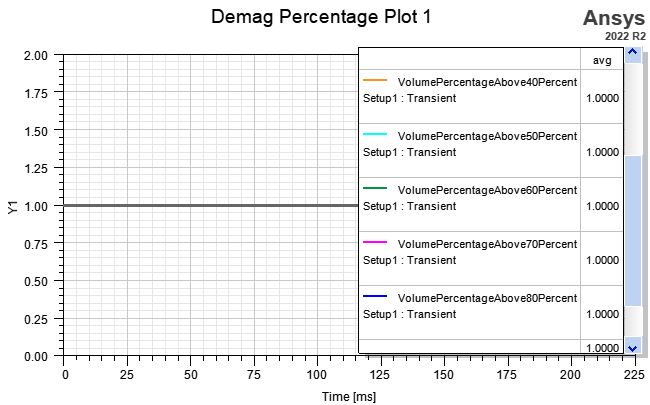
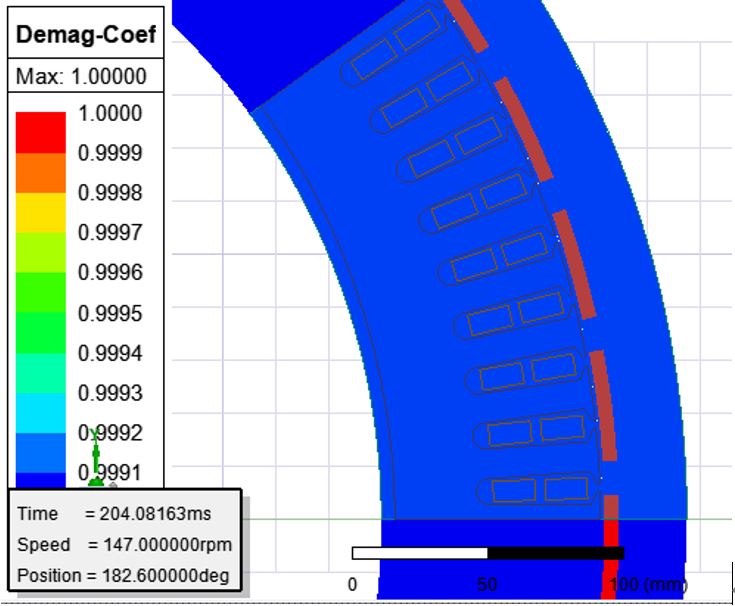
Joonis 5: Püsimagnetite demagnetiseerimiskiiruse kõver ja demagnetiseerimise kontuurikaart
Süvenemine ja väljavaade
Nii simulatsiooni kui ka mõõtmise abil saab tõhusalt kontrollida veojõumasina tähetihendusmomenti ja püsimagneti demagnetiseerimise ohtu, pakkudes tugevat tuge jõudluse optimeerimiseks ning tagades veomasina ohutu töö ja pikaealisuse. Selles artiklis ei uurita mitte ainult täht-tihendusmomendi ja demagnetiseerimise arvutamist püsimagnetitega sünkroonsetes veojõuseadmetes, vaid edendatakse ka liftide ohutuse ja jõudluse optimeerimise parandamist. Ootame tehnoloogilise arengu edendamist ja uuenduslikke läbimurdeid selles valdkonnas interdistsiplinaarse koostöö ja vahetuste kaudu. Samuti kutsume rohkem teadlasi ja praktikuid sellele valdkonnale keskenduma, andes oma tarkuse ja jõupingutused püsimagnetitega sünkroonveomasinate jõudluse parandamiseks ja liftide ohutu töö tagamiseks.
Uudiste soovitused

Kohtumine "Ni" | Nideco liftikomponendid debüteerivad 2026. aasta Hiina rahvusvahelisel liftinäitusel
2026-06-20
Nidec Elevator Components Guangde Co., Ltd. avab suure hooga, mis annab ülemaailmsele intelligentsele tootmisele uuenduse lifti põhikomponentide jaoks
2026-06-20
Uued võimalused Siiditeel: Kasahstani liftituru uurimine
2026-06-20
Nideci üliõhuke masina moderniseerimislahendus
2026-03-21
Modulaarne ühehambaline mähis staatorile seab uue standardi kõrge efektiivsusega tootmisele
2026-03-02